孚智能科技有限公司")
熱(rè)線電話
137-5501-7422公司地址
湖(hú)南省(shěng)長沙市瀏陽市永安鎮永安東路與永新路交界處
當前位置:首頁 > 產品(pǐn)中心 > 巡檢機器人牽引裝(zhuāng)置
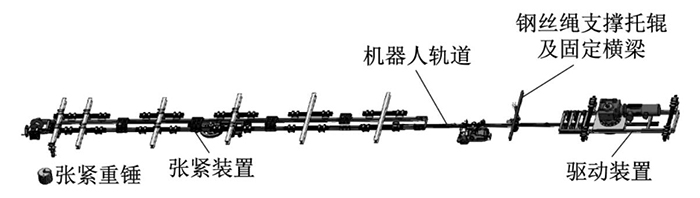
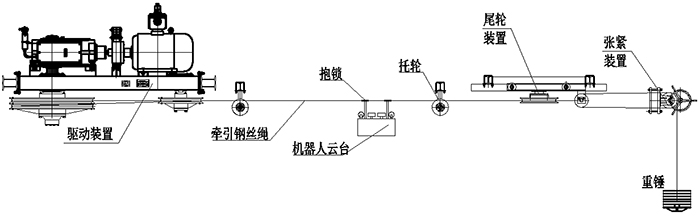
繩牽引係統由驅動裝置提供動力,牽引鋼絲繩帶(dài)動巡檢機器人在軌道上運行(háng),在運行過程中能利用摩擦輪傳動為機器人充(chōng)電,解決了長距離大坡度巡檢(jiǎn)機器人(rén)電池(chí)巡航能力低(dī),巡檢機器人(rén)井下(xià)充電等問題。


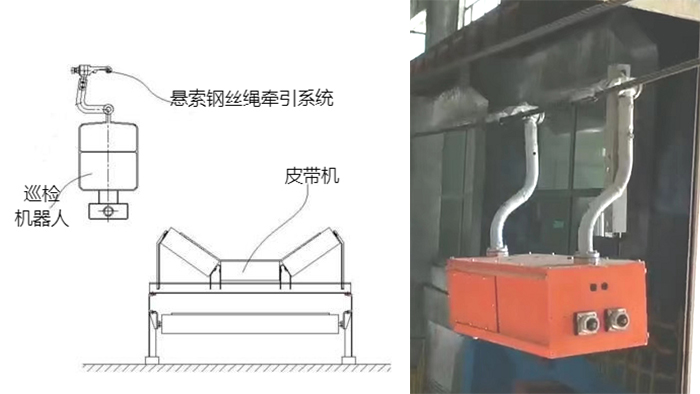
3.2懸索式巡(xún)檢機器人繩牽引係統結構特征
該懸索牽引裝置不(bú)設置軌道,巡檢機器人直接掛載在鋼絲繩上運行,采用先進(jìn)的PLC控製的電控係統,由機(jī)器(qì)人上位(wèi)機自動控製實現電氣聯動。
因無軌道運行,大大減低了產品的生產及(jí)安裝成本(běn),施工更加便捷。具有遠程控製,精準定點巡檢,前進/後退,指定速(sù)度,往複運行(háng),故障自檢(jiǎn),電控保護等功能,配置自動充電結構裝置等,是一種新型的懸索式巡檢機器人繩牽引係統。

137-5501-7422
湖南省長沙市瀏(liú)陽市永安鎮永安東路與永(yǒng)新路交界(jiè)處
hunancf@163.com
 掃碼添加微信
掃碼添加微信
 掃碼訪問移動站(zhàn)
掃碼訪問移動站(zhàn)
南川孚(fú)智能科技有限公司")